 Общие сведения.
Общие сведения.
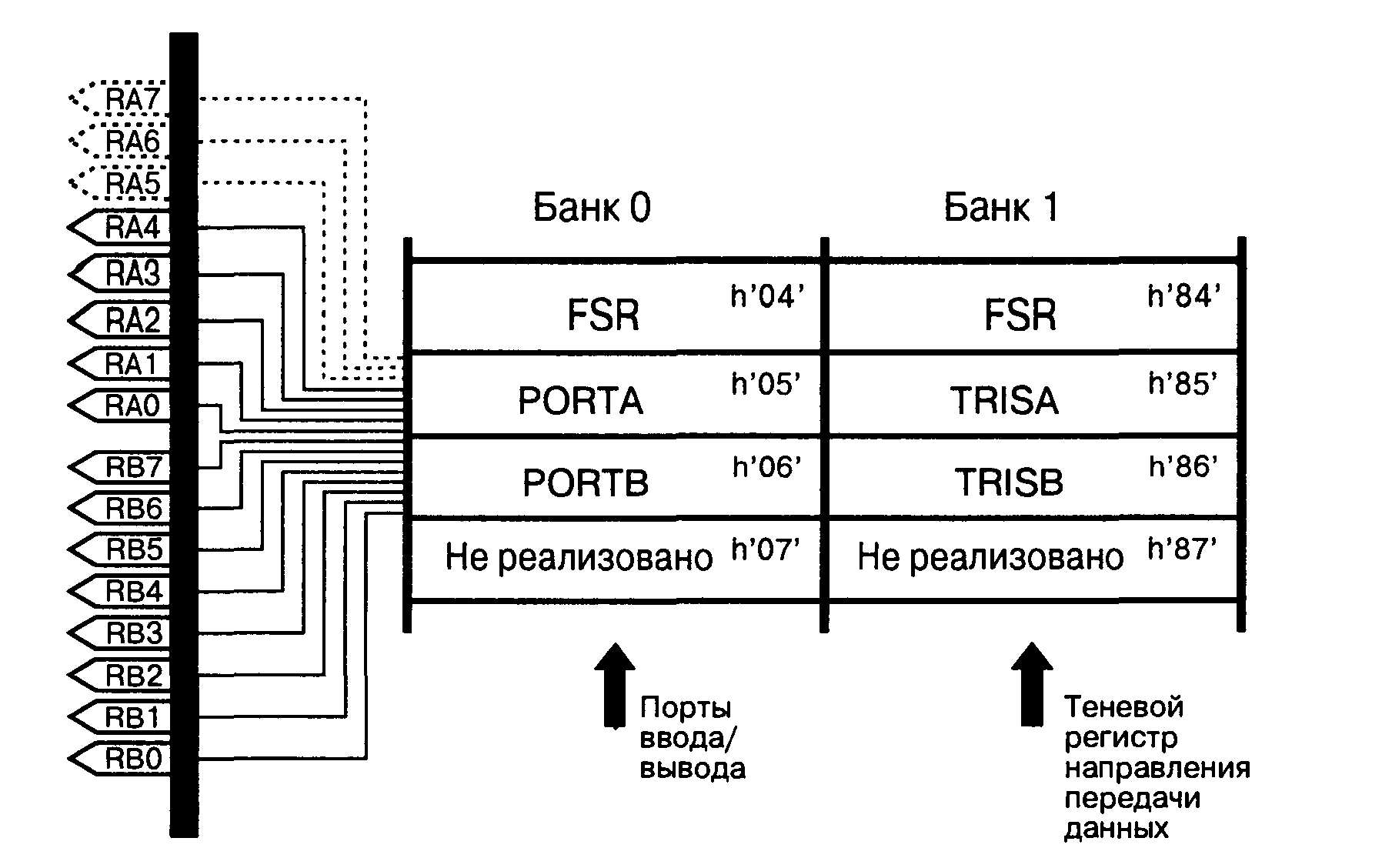
Через параллельные порты реализуется основной интерфейс между микроконтроллером и внешними устройствами. Количество линий ввода/вывода
8–разрядных микроконтроллеров равно 8. В карте памяти микроконтроллера каждый порт ввода/вывода представлен регистром данных порта. Для обращения к регистру данных при организации обмена в параллельном формате используются те же команды, что для обращения к ячейкам резидентной оперативной памяти. Доступ к отдельным разрядам портов осуществляется специальными командами, которые называются командами битового процессора.
По функциональному признаку
параллельные порты разделяют на три группы:
● однонаправленные порты, предназначенные для передачи информации в одном направлении (только для ввода или только для вывода);
● двунаправленные порты, позволяющие задавать направление передачи всех линий и каждой линии в отдельности. В случае необходимости каждая линия может быть сконфигурирована индивидуально и обслужена командами битового процессора независимо от других линий того же порта ввода/вывода;
● порты с альтернативными функциями, которые определяются состоянием микроконтроллера. Отдельные линии таких портов связаны со встроенными в микроконтроллер периферийными модулями (таймером, АЦП, контроллером, последовательным приемопередатчиком и др.), при этом:
• если модуль активизирован, то задействованные линии ввода/вывода порта автоматически конфигурируются в соответствии с функциональным назначением в модуле и не могут быть использованы по другому назначению;
• если же периферийный модуль МК не используется, то его выводы можно задействовать как обычные линии ввода/вывода порта.
Альтернативную функцию могут иметь линии однонаправленных и двунаправленных портов.
Структурно–функциональные особенности портов.
Рассмотрим схемотехнику портов ввода/вывода на уровне одной линии. Совокупность аппаратных средства, обслуживаемых одну линию порта называют драйвером порта. Рассмотрим основные типы двунаправленных драйверов (или линий ввода/вывода). 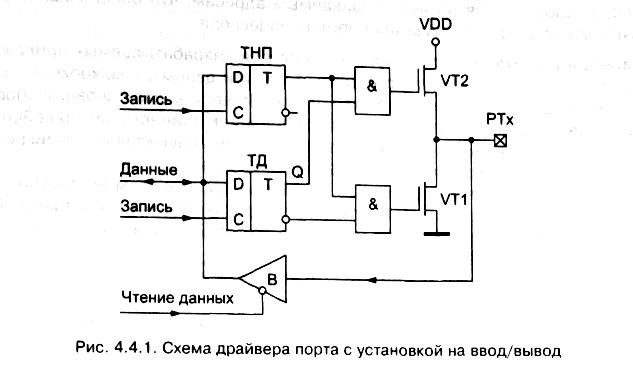
Драйверы с установкой на ввод/вывод.
Схема такого драйвера приведена на рис. 4.4.1. Настройка драйвера на ввод/вывод осуществляется установкой бита в специальном триггере направления передачи (ТИП). Нулевое значение бита конфигурирует драйвер на ввод, единичное — на вывод.
Режим ввода данных
автоматически устанавливается после сброса микроконтроллера. В исходном состоянии триггер направления передачи ТНП и триггер данных ТД находятся в нулевом состоянии, с выходов логических элементов И снимаются нулевые уровни сигналов, транзисторы
VT
1 и
VT
2 заперты и не влияют на процесс ввода. При вводе данных:
● на управляемый буфер В подается сигнал чтения данных (
RD
# = 0, где # — знак инверсии), открывая его;
● поступающие на вывод РТх данные передаются непосредственно на внутреннюю линию Данные, минуя триггер данных ТД.
Режим вывода данных
инициируется путем установки триггера направления передачи ТНП в единичное состояние, после чего на один из входов логических элементов И поступает единичный уровень и управление транзисторами
VT
1 и
VT
2 выходного каскада порта передается триггеру данных ТД. Если на прямом выходе ТД установлен сигнал
Q
= 1, то открыт транзистор
VT
2 и на выходе контроллера РТх = 1. При
Q
= 0 открыт транзистор
VT
1 и РТх = 0.
Рассмотренное техническое решение реализовано в микроконтроллерах НС08 фирмы
Motorola
. Его достоинство — высокоомный вход в режиме ввода, недостаток — наличие триггера направления передачи.
Драйверы с установкой на ввод.
Схема драйвера, требующего предварительную установку только на ввод данных, приведена на рис. 4.4.2. 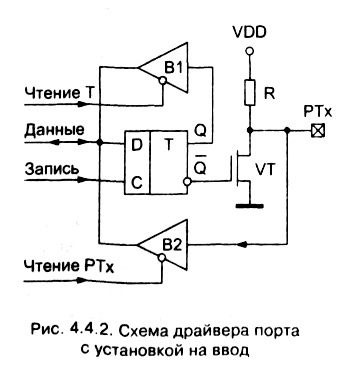
Режим ввода данных
инициируется установкой триггера Т в состояние
Q
=1. Состояние триггера Т контролируется с помощью буфера В1. В этом режиме транзистор
V
Т1 заперт сигналом с инверсного выхода триггера. Данные в микроконтроллер поступают через буфер В2. Сопротивление со стороны вывода РТх определяется значением резистора
R
. После сброса микроконтроллер автоматически устанавливается в режим ввода. По сути дела, режим ввода соответствует режиму вывода единичного бита.
Режим вывода данных
не требует никаких предварительных установок:
● при выводе нулевого бита триггер Т переводится в состояние
Q
= 0, отпирается транзистор
VT
и с выхода РТх снимается сигнал с низким уровнем;
● при выводе единичного бита триггер Т переводится в состояние
Q
=1, транзистор
VT
запирается и с выхода РТх снимается сигнал с высоким уровнем. Рассмотренное техническое решение реализовано в микроконтроллерах
MCS
51 фирмы
Intel
. Его недостаток — низкое входное сопротивление в режиме ввода, обусловленное необходимостью использования подтягивающего к 1 резистора
R
для вывода единичного бита.
Драйверы с управляемыми подтягивающими резисторами.
Для устранения указанного выше недостатка в схему драйвера вводится управляемый подтягивающий резистор. Одно из таких технических решений приведено на рис. 4.4.3.
В качестве нагрузки выходного каскада используются транзисторы
VT1
и
VT3.
Управляемый транзистор
VT1
обладает сопротивлением в сотни раз меньшим по сравнению с транзистором
VT3.
Он обеспечивает быстрое переключение схемы и большую амплитуду импульса при выводе единичного бита. Транзистор
VT3
выполняет функцию подтягивающего резистора в установившемся режиме, его сопротивление значительно больше, чем
R
в схеме на рис. 4.4.2. При выводе единичного бита с появлением
Q# =
0 отпирается транзистор
VT1
и на выходе формируется логический уровень РТх = 1. Через некоторое время на выходе элемента задержки
D
появляется единичный сигнал, который переводит транзистор
VT1
в запертое состояние. 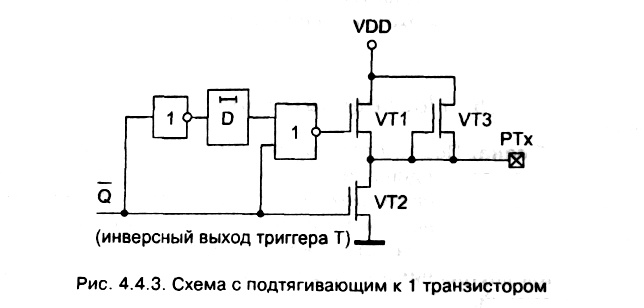
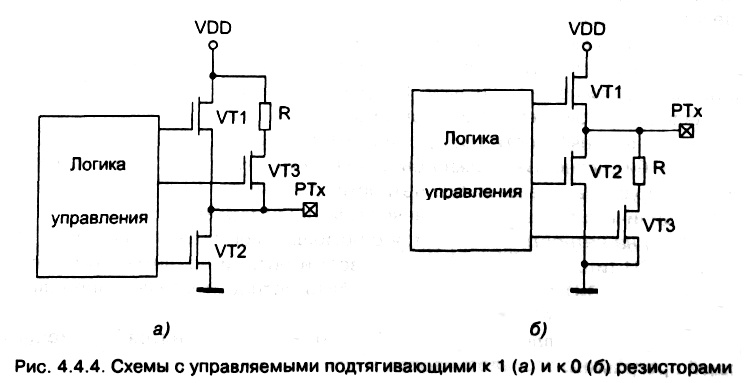
На рис. 4.4.4 приведены общие технические решения с управляемыми подтягивающими резисторами. В схеме на рис. 4.4.4, а резистор
R
с помощью
VT
3 подключается параллельно нагрузочному транзистору
VT
1, что позволяет при выводе данных подтягивать логический уровень к 1. В схеме на рис. 4.4.4, б резистор
R
подключается параллельно транзистору
VT
1, что позволяет подтягивать логический уровень к 0. Приведенные схемы используются в контроллерах фирмы
Motorola
. 
В контроллере имеются средства программного подключения подтягивающих резисторов:
● специальный бит регистра конфигурации разрешает подключение резистора
R
;
● биты 0–7 регистра входного сопротивления непосредственно подключают
R
к требуемой линии. Значение бита можно многократно изменять в ходе выполнения прикладной программы. Следовательно, имеется возможность динамического управления входным сопротивлением по каждой линии порта ввода.