Программируемый параллельный интерфейс
Программируемый параллельный интерфейс
Назначение и структура интерфейса.
Программируемый параллельный интерфейс (ППИ) позволяет организовать обмен 8–разрядными операндами между микропроцессором и внешними устройствами (ВУ) по трем каналам. Направление обмена и режим работы каждого канала задаются программно путем записи управляющего слова.
В ППИ можно выделить следующие составные части (рис. 3.4.1):
? двунаправленный 8–разрядный буфер канала данных (БКД) с тремя состояниями;
? три 8–разрядных канала связи (КА, КВ, КС) с ВУ, причем канал КС может быть разделен на два канала КС1, КС2. В канале КА предусмотрено два регистра, один из которых используется для передачи данных со стороны микропроцессора в ВУ, другой — в обратном направлении. В каналах КВ, КС имеется по одному регистру, обеспечивающему передачу данных в требуемом направлении. Все каналы снабжены входными и выходными формирователями с тремя состояниями, выполняющими функции буферов. Каналы КС1 и КС2 используются для управления каналами КА и КВ;
? регистр управляющего слова
(РУС), предназначенный для организации обмена данными между регистрами каналов и ВУ. На его вход подается сигнал сброса
R;
? устройство управления
(УУ), предназначенное для выбора канала и обеспечения требуемых режимов работы. На его входы подаются следующие сигналы:
• ?Зп — для записи в регистры ППИ информации, поступающей из микропроцессора по шине данных ШД;
• ?Чт — для выдачи информации из регистров ППИ на ШД;
• А1, А0 — содержимого двух младших разрядов шины адреса процессора, образующих код для выбора одного из каналов КА, КВ, КС или РУС;
• ?ВК — выборки кристалла (микросхемы ППИ), в качестве которого при малом числе ВУ (следовательно, микросхем) можно использовать один из старших разрядов А15…..А2 шины адреса. 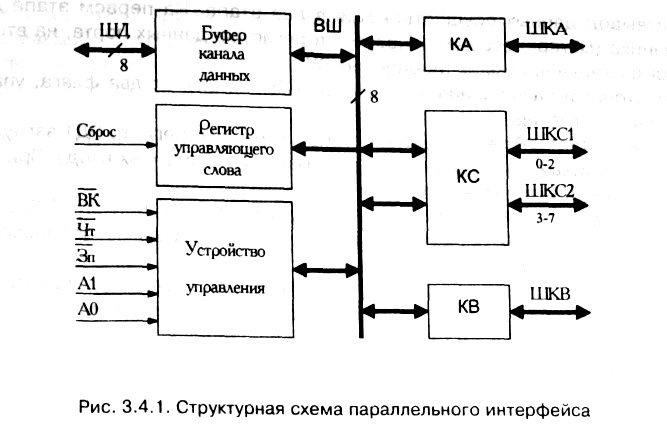
Выходные сигналы устройства управления (на рис. 3.4.1 не показаны) координируют работу всех узлов ППИ.
Общие принципы организации обмена.
Обмен информацией между процессором и ВУ происходит по командам ввода
(IN),
вывода
(OUT)
и разделяется на два вида: обмен между процессором и ППИ и обмен между ППИ и ВУ. Рассмотрим, как организуется каждый из них.
Первый вид обмена
осуществляется между шиной данных (ШД) процессора и регистрами каналов КА, КВ, КС (а также РУС при выводе информации из процессора) ППИ с помощью буфера канала данных (БКД) и внутренней шины данных (ВШ). Виды обмена между шиной данных процессором и регистрами ППИ определяются входными сигналами устройства управления и приведены в табл. 3.4.1.
При ?ВК =
1 буфер канала данных находится в третьем состоянии независимо от значений других входных сигналов. Комбинация входных сигналов А0 = А1 = ?Зп = 1,
![]()
= ?Чт = 0 является запрещенной, так как не предусмотрен вывод данных из РУС.
Для второго вида обмена информацией между регистрами каналов КА, КВ, КС (РУС не участвует) и внешним устройством используется восьмиразрядное управляющее слово, хранящееся в РУС. С его помощью производится установка ППИ в один из возможных режимов работы (режим 0, 1 или 2) для выполнения каналами определенных функций и задается направление обмена. Ниже приведено назначение разрядов управляющего слова:
?
D0, D1,
D3, D4
— устанавливают соответственно каналы КС1,
KB,
КС2, КА на ввод информации в канал при
Di =
1 или на вывод в ВУ при
Di
= 0
(i
= 0, 1, 3, 4). Четырехразрядный код
D4D3D1D0
определяет 16 возможных состояний каналов;
?
D2
— устанавливает каналы КВ и КС1 в режим 0 при
D2
= 0 и в режим 1 при
D2
= 1;
?
D5, D6
— задают двухразрядный код
D6D5
для установки режима каналов КА и К
C
2: 00 — режим 0; 01 — режим 1; 10 или 11 — режим 2;
?
D7
— задает место загрузки управляющего слова: РУС при
D7 =
1 и один из восьми триггеров регистра канала КС при
D7
= 0. В последнем случае разряды
D3, D2, D1
управляющего слова образуют код
D3D2D1,
который указывает загружаемый триггер, а разряд
D0
задает значение (0 или 1) загружаемых данных.
Режимы работы.
Режим 0.
В этом режиме установка каналов КА,
KB,
КС1, КС2 на ввод или вывод информации производится с помощью разрядов
D4, D1, D0, D3
управляющего слова. Значения разрядов
D2, D5, D6
должны быть равны нулю.
Выбор вида обмена между ШД и каналами задается входными сигналами устройства управления. Последовательность подачи управляющих сигналов при вводе информации в микропроцессор и выводе из него показана на рис. 3.4.2. Какие–либо дополнительные сигналы управления не формируются. 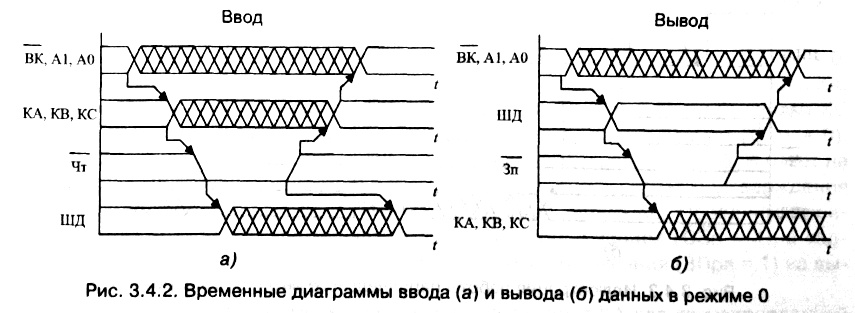
Режим 1.
Этот режим позволяет осуществлять передачу информации по каналам КА и КВ в различных направлениях с помощью управляющих сигналов, поступающих по каналу КС. Возможны четыре комбинации взаимных направлений передачи: КА, КВ — ввод; КА, КВ — вывод; КА — ввод, КВ — вывод; КА— вывод, КВ — ввод. 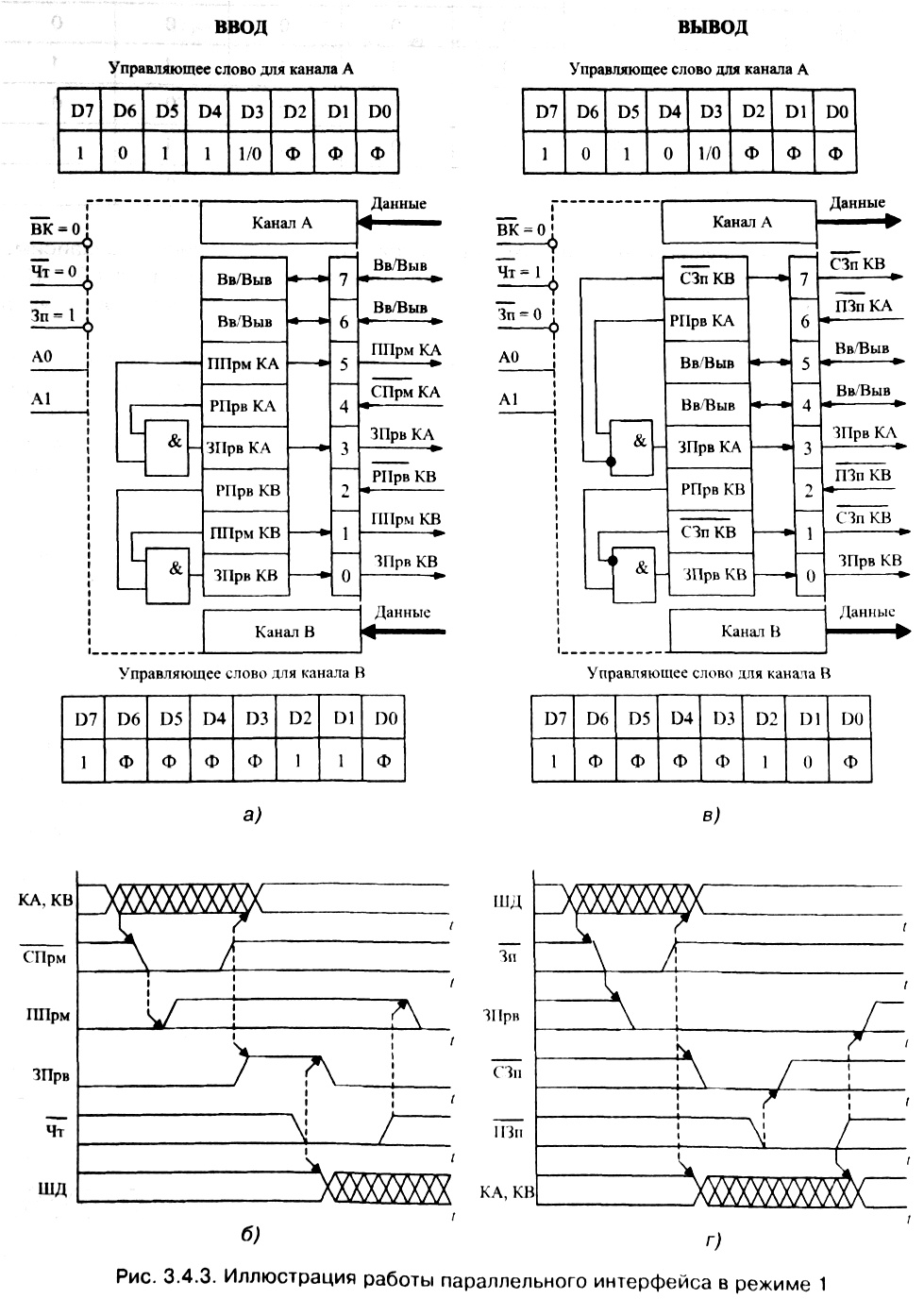
На рис. 3.4.3 приведены функциональные схемы канала КС и временные диаграммы для случаев, когда оба канала КА и КВ установлены на ввод (рис. 3.4.3, а, б) или вывод (рис. 3.4.3, в, г) данных. При вводе и выводе разряды 0–2 канала КС задействованы для обслуживания канала КВ, разряды 3–7 — для обслуживания канала КА. Не задействованные под управляющие сигналы разряды канала КС (6, 7 — при вводе; 4, 5 — при выводе) могут быть использованы в качестве дополнительного канала для обмена информацией.
Установка режима 1 задается программно значениями разрядов в управляющем слове. В верхней и нижней части рис. 3.4.3, а, в приведены форматы управляющих слов для операций ввода и вывода по обоим каналам КА и КВ. Следует отметить, что в режиме 1 значение разряда: 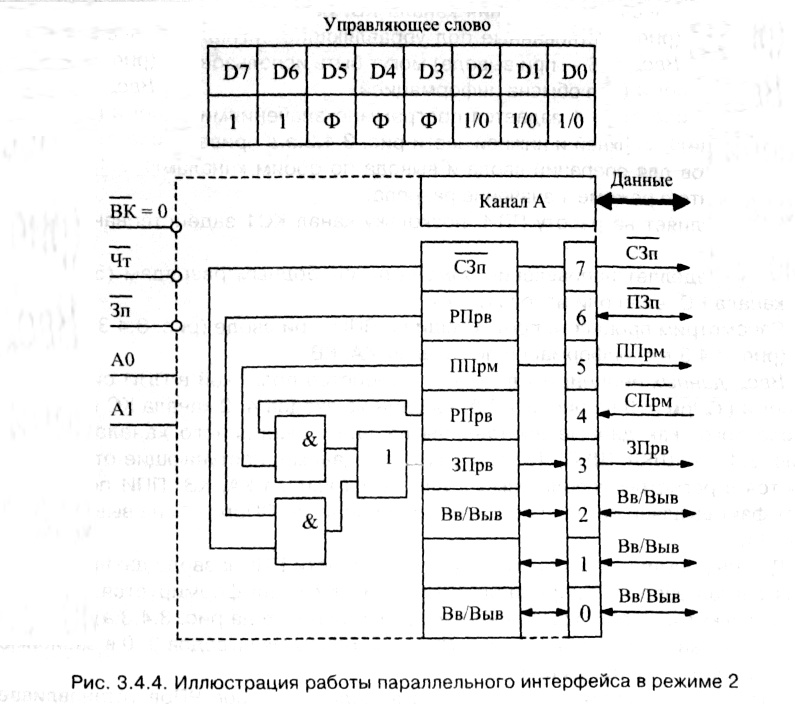
?
D0
не влияет на работу ППИ, поскольку канал КС1 задействован под управление;
?
D3
определяет направление обмена по свободным разрядам (5, 6 или 4, 5) канала КС, если они используются.
Рассмотрим процессы, протекающие в ППИ, при вводе (рис. 3.4.3, а, б) и выводе (рис. 3.4.3, в, г) информации по каналам КА, КВ.
Ввод данных
инициирует внешнее устройство посылкой в ППИ сигнала строб приема ( ?СПрм = 0 на рис. 3.4.3, б) на один из входов 4, 2 канала КС (рис. 3.4.3, а) после того, как данные выставлены на шину выбранного канала КА или КВ (рис. 3.4.1 — ШКА, ШКВ). По этому сигналу данные, поступающие от ВУ, записываются в регистры используемого для ввода канала КА, КВ. ППИ подтверждает этот факт выдачей сигнала подтверждение приема (ППрм = 1) на выводах 5, 1 канала КС.
Для информирования процессора о готовности ППИ к вводу данных используется сигнал запроса прерывания (ЗПрв). Этот сигнал формируется в канале КС с помощью триггеров разрешения прерывания (РПрв на рис. 3.4.3, а) и появляется по окончании действия сигнала ?СПрм на одном из выводов 3, 0 в зависимости от выбранного канала КА или КВ.
Сигнал разрешения прерывания на выходе триггеров РПрв устанавливается программно и не поступает на внешние зажимы канала КС. По сигналу ЗПрв = 1 в микропроцессоре вырабатывается сигнал Чт = 0, который поступает на вход устройства управления ППИ и инициирует передачу данных из регистров действующего канала КА, КВ на шину данных ШД.
По фронту сигнала ?Чт (1 —> 0) прекращается действие сигнала ЗПрв, а по срезу (0 —> 1) — действие сигнала ППрм.
При выводе данных из процессора на вход записи ППИ поступает сигнал ?Зп = 0, по которому информация с ШД записываются в регистры выбранного канала КА, КВ, а сигнал запрос прерывания снимается с выводов 3, 0 (ЗПрв = 0) канала КС (рис. 3.4.3, г). В канале КС (выводы 7, 1) формируется строб записи ( ?СЗп = 0), подтверждающий принятие данных от процессора, и передается на ВУ. В ответ на этот сигнал ВУ принимает из ППИ данные и вырабатывает сигнал подтверждения записи ( ?ПЗп = 0), который поступает на выводы 6, 2 канала КС. Передним фронтом сигнала ?ПЗп (1 —> 0) прекращается действие строба записи ( ?СЗп = 1), а задним фронтом (0 —> 1) активизируется сигнал запроса прерывания (ЗПрв = 1) на вывод следующего байта данных.
Режим 2.
В этом режиме используется только канал КА для двунаправленной передачи данных. Управляющие сигналы канала КС в режиме 2 являются комбинацией управляющих сигналов для канала КА при вводе и выводе в режиме 1 (рис. 3.4.4). Свободные младшие разряды 0, …, 2 канала КС могут быть использованы для управления каналом КВ в режиме 0 или 1, если они задействованы. Режим 2 устанавливается с помощью управляющего слова, формат которого приведен в верхней части рис. 3.4.4. Младшие разряды
D
0, …,
D
2 (в соответствии с их назначением в управляющем слове) обслуживают каналы КВ, КС.
Процессы, протекающие в ППИ при обмене данными в режиме 2, сходны с процессами в режиме 1. Отличительная особенность режима 2 состоит в следующем. В режимах 0, 1 направление обмена данными между ППИ и ВУ задается управляющим словом, предварительно засылаемым из процессора в РУС. Поэтому каждое изменение направления обмена данными требует временных затрат. В режиме 2 сигналами ?Чт , ?Зп устанавливается обмен информацией не только между процессором и ППИ, но и между ППИ и ВУ. Таким образом, обеспечивается возможность быстрого переключения направления передачи информации в целом между процессором и ВУ.
При подаче сигнала сброса
R
= 1 переводятся в нулевое состояние РУС и триггеры разрешения прерывания РПрв, а все каналы устанавливаются в режим 0 для ввода данных. Режимы работы каналов можно изменять как в начале, так и в процессе выполнения программы, что позволяет ППИ обслуживать различные ВУ в определенном порядке. При изменении режима работы любого канала все регистры каналов (в том числе и триггеры разрешения прерывания) сбрасываются. Состояние ППИ в режимах 1, 2 можно контролировать по значению разрядов регистра канала КС на его выводах (рис. 3.4.1, рис. 3.4.4) и использовать при составлении и реализации программы. Для чтения информации состояния используется обычная операция чтения канала КС. Свободные разряды канала КС можно использовать для обмена информацией с помощью операции чтения или путем записи данных в триггеры этих разрядов с помощью управляющего слова (при
D
7 = 0).

Встречаются исключительно индивидуально, проститутки Кургана к салонам отношения не имеют - dosugkurgan.ru. В одном месте собраны настоящие анкеты с фотографиями и контактными данными самых лучших проституток города. Изящные проститутки Кургана, восхитительные и горячие, они такие грациозные и стройные, что интимный досуг тебе обеспечен. Выбери девушку сейчас.