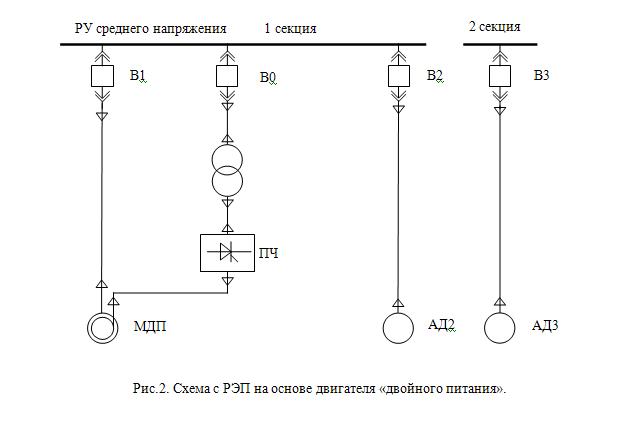
Учитывая, что требуемый диапазон регулирования насоса по заданию составляет от 50 до 100%, следует рассмотреть следующий возможный вариант. По технико-экономическим соображениям при таком диапазоне регулирования частоты наиболее оправданными являются каскадные схемы электропривода переменного тока на базе асинхронного двигателя двойного питания. При этом обмотки статора электродвигателя подключаются к сети 6/10 кВ, а управляющая обмотка – к преобразователю частоты.
В каскадных схемах преобразованию подвергается только мощность скольжения, которая, как известно, пропорциональна скольжению машины и мощности статора. Требуемая мощность преобразовательного оборудования зависит от диапазона регулирования скорости двигателя и не превышает 0,5 Рном двигателя.
При этом преобразователь низковольтный (до 1000 В). и современная элементная база позволяет реализовать практически любые мощности электропривода без усложнения силовой схемы преобразователя.
КПД такого электропривода в номинальном режиме практически равен КПД электродвигателя (снижается на 1% для схемы с однозонным регулированием и повышается на 1% для схемы с двухзонным регулированием).
 Снята проблема резервирования на случай повреждений преобразовательного оборудования – электропривод автоматически по «грубому» алгоритму переходит в нерегулируемый режим с обеспечением непрерывности технологического процесса.
Снята проблема резервирования на случай повреждений преобразовательного оборудования – электропривод автоматически по «грубому» алгоритму переходит в нерегулируемый режим с обеспечением непрерывности технологического процесса.
Экономически выгоднее заменить штатный двухскоростной электродвигатель и установить каскадную схему электропривода, нежели к существующему двигателю «пристыковать» высоковольтный преобразователь в статорную обмотку.
Другие известные схемы высоковольтного частотно-регулируемого привода даже при наличии дорогостоящей и громоздкой системы резервирования не имеют такого преимущества, что, в конечном итоге, приводит к снижению КПД, увеличению установленной мощности электродвигателя и преобразовательного оборудования с устройствами резервирования.
В настоящее время разработаны и нашли практическое применение две разновидности каскадного электропривода переменного тока:
– асинхронизированный синхронный двигатель – АСД (рис. 3, а);
– асинхронно-вентильный каскад – АВК (рис. 3, б).
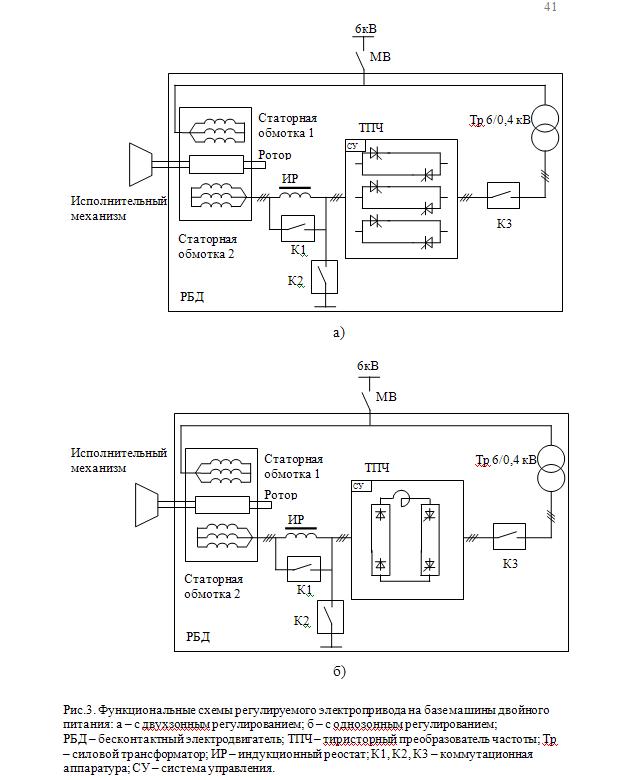
Эти схемы отличаются в основном принципом построения преобразователя частоты, определяющим, в свою очередь, технические характеристики всего электропривода.
В АВК используется преобразователь частоты с промежуточным звеном постоянного тока, включающий в себя выпрямитель, инвертор, сглаживающий дроссель и согласующий трансформатор.
Такой преобразователь обеспечивает односторонний переток активной мощности из управляющей обмотки машины через выпрямитель – инвертор – трансформатор в сеть.
Поэтому регулирование частоты вращения в АВК осуществляется в сторону снижения от номинального значения для асинхронного двигателя (однозонное регулирование).
Резервный режим работы при неисправности аппаратуры управления – режим с короткозамкнутой управляющей обмоткой. При этом электропривод обеспечивает максимальную частоту вращения nmax и, соответственно, максимальную производительность механизма.
В схеме АСД к управляющей обмотке подключен тиристорный преобразователь частоты с непосредственной связью (ТПЧ), обеспечивающий однократное преобразование мощности скольжения и двухсторонний свободный переток активной мощности между ротором машины и сетью.
Благодаря этому в АСД возможно двухзонное регулирование частоты вращения относительно синхронной. При этом электродвигатель выбирается на одну ступень меньшей мощности и с меньшей синхронной частотой вращения по сравнению с предыдущим вариантом.
Резервный режим работы электропривода при выходе из строя преобразователя частоты – режим короткозамкнутого ротора с синхронной частотой вращения, и при этом электропривод обеспечивает 85 – 90% максимальной производительности механизма.
Практическое применение в энергетике и других отраслях промышленности нашли обе схемы электропривода, причем как в варианте с обычным асинхронным электродвигателем с фазным ротором (управляющей обмоткой является обмотка ротора), так и в бесконтактном исполнении (управляющая обмотка расположена на статоре).
Бесконтактный электродвигатель агрегатного исполнения содержит в одном корпусе 2 статорных сердечника и общий ротор с соединенными между собой обмотками (узел токосъема отсутствует). Одна статорная обмотка используется для включения в сеть 6 – 10 кВ, а вторая с пониженным напряжением – управляющая – подключается к преобразователю.
Этот электродвигатель может быть изготовлен и в так называемом совмещенном исполнении, где обе обмотки размещены на одном статоре (в одних и тех же пазах) как в двухскоростных электродвигателях, а на роторе расположена одна короткозамкнутая обмотка, не имеющая выводов и контактных колец.
Объединение АО «Электромаш» (г. Тирасполь) освоило производство таких бесконтактных электроприводов типа РБД, наладило их выпуск и комплектную поставку. Имеется значительный опыт эксплуатации такого электропривода [1,3]. В энергетике с 1985 по 1994 г. внедрено более 20 электроприводов мощностью 630-1400 кВт.
Только на Минской ТЭЦ-4 до настоящего времени успешно эксплуатируются 7 электроприводов двойного питания общей мощностью 8,5 МВт, из них 5 электроприводов на базе двигателей с фазным ротором и 2 – с бесконтактными машинами отечественного и зарубежного производства [3].
Опыт эксплуатации регулируемого электропривода по схеме «машина двойного питания» первого и второго поколения, разработанных с использованием отечественной элементной базы на аналоговых и импульсных элементах, показал следующее [1,3]:
– с использованием РЭП достигается непосредственная экономия электроэнергии, затрачиваемой механизмами с электроприводами (по статистике она составляет в среднем 25 – 40 %);
– большинство механизмов спроектированы со значительным запасом по производительности, что, с учетом требований по обеспечению пуска, приводит к использованию короткозамкнутых электродвигателей на 2-3 ступени большей мощности, чем необходимо при наличии регулируемого электропривода;
– наибольшее число отказов в работе электропривода 1-го и 2-го поколений наблюдается в течение первых 2-3 месяцев эксплуатации. При этом имели место отказы электронных элементов системы управления, и сопровождались они автоматическим переключением в нерегулируемый режим с обеспечением необходимой производительности механизма;
– в электроприводе на базе двигателей с фазным ротором типа АКЗО имели место отказы по вине щеточного узла из-за скопления угольной пыли на изолирующих шайбах между контактными кольцами. После модернизации этого узла и обеспечения его обдува надежность электродвигателей с фазным ротором была повышена до уровня надежности электродвигателей типа ДАЗО;
– эксплуатация бесконтактных электродвигателей агрегатного исполнения отечественного двухкорпусного РБД-1000-750 и зарубежного однокорпусного фирмы «ЭЛИН УНИОН» показала их высокую надежность, на основании чего сделан вывод о целесообразности их широкого внедрения;
– благодаря наличию сильного фильтрующего действия обмоток электродвигателя, особенно в бесконтактном типа РБД, и согласующего трансформатора, а также вследствие небольшой преобразуемой мощности, влияние электропривода на сеть собственных нужд по высшим гармоникам не превышает норм ГОСТ и не требует применения фильтро-компенсирующих устройств;
– полностью решена задача пуска и самозапуска электропривода (учитывая ограниченный регулировочный диапазон) с ограничением пусковых токов путем разработки одноступенчатого пускового устройства – индукционного реостата, обеспечивающего необходимый пусковой момент с автоматическим его изменением в процессе пуска.
Реостат представляет собой трехфазный трансформатор со специальным сердечником из конструкционной стали, встроенный в шкаф преобразовательного агрегата. Надежность такого устройства по сравнению с традиционными резисторными станциями пуска значительно выше, кроме того, устройство не требует обслуживания.